В рамках реализации компанией Alstom пилотного проекта создания цифровой подстанции ПС Надежда МЭС Урала мы столкнулись с таким вопросом. В результате R&D центром Alstom был проведен ряд тестов, анализирующих поведение алгоритмов защит при искажении сигнала или задержке его поступления. Был выработан ряд рекомендаций, как это влияние минимизировать. Данные рекомендации были положены в основу технических решений по проекту.
Настоящая статья посвящена техническим решениям по организации цифровой системы РЗА, которые были выработаны на основе этих рекомендаций. При этом в статье не будут затрагиваться теоретические вопросы моделирования шины процесса или анализа пропускной способности коммутаторов. Статья будет сфокусирована на практических результатах и мерах по обеспечению надежной работы терминалов РЗА при появлении внешней коммуникационной шины. Все проблемы, с которыми мы столкнулись в ходе выработки технических решений по проекту, условно можно разделить две категории: внешние – это проблемы, которые могут быть устранены техническими решениями, применяемыми по проекту; внутренние – т.е. такие, которые могут быть устранены только разработчиками оборудования или алгоритмов защиты. К внешним проблемам можно отнести:- обеспечение надежность доставки информации к терминалу РЗА, т.е. вопросы, касающиеся резервирования и физической сегментации шины процесса;
- ограниченная пропускная способность шины процесса, что ведет к необходимости применения логической сегментации;
- обеспечение синхронизации времени, причем к этому вопросу можно отнести как саму точность синхронизации в 1 микросекунду, так и ее бесперебойность;
- искажение сигнала или потеря пакетов данных – бороться можно только путем изменения физической топологии сети.
- определение рамок надежной работы алгоритма защиты при искажении входного сигнала или потере пакетов данных, что в свою очередь выразилось в появлении новых уставок в терминалах РЗА и ряде рекомендаций от разработчиков;
- адаптация существующего алгоритма терминала под цифровую подстанцию.
- Merge Unit delay – для защит, принимающих несколько потоков данных; показывает максимально возможное рассогласование поступающих потоков;
- Опция MUs Delay Search – если заданием соответствующей уставки пользователь инициализирует процесс поиска (MUs Delay Search = Yes), то реле в течение следующих двух секунд начинает отслеживать и выводить на индикацию максимальную обнаруженную задержку между приемом фреймов с идентичным подсчетом выборок;
- Loss Rate Level – расчет степени потерь фреймов (‘Frame Loss Rate’) выполняется в реле каждую секунду для каждого SV-потока, с которым оно поддерживает связь, а затем полученное значение сравнивается с уставкой Loss Rate Level. Если степень потери фреймов ниже заданной уставки, то алгоритм реле разрешает потерю сети в течение трех последовательных выборок. Если величина потерь фреймов превышает заданную уставку или если потеря сети продолжается более чем 3 последовательных фрейма значений выборок, то это будет иметь тот же эффект, как и метки (теги) недостоверных данных (Invalid), присвоенные фреймам значений выборок; соответствующие функции защиты будут временно запрещены;
- Сигнализация снижения качества или 9-2 Sample Alarm – сигнал, указывающий на выполнение одного или нескольких условий, связанных с контролем качества фреймов значений выборок и их синхронизации. Сигнал выдается, если выполняется одно из перечисленных ниже условий:
- один или более полученный фрейм значений выборок не синхронизирован, как это требуется конфигурацией реле;
- один или более ожидаемый фрейм значений выборок не получен;
- один или более полученный фрейм значений выборок имеет идентификатор низкого качества (‘invalid’);
- один или более полученный фрейм значений выборок имеет идентификатор сомнительного качества (‘questionable’), а реле сконфигурировано не воспринимать такие фреймы значений выборок;
- один или более принятый фрейм значений выборок имеет флаг теста, а реле сконфигурировано на запрет защит при приеме фреймов с флагом теста;
- один или более принятый фрейм значений выборок имеет флаг теста, а реле сконфигурировано на прием только фреймов с флагом теста;
- принятые значения выборок имеют номинальную частоту, отличную от установленной в реле.
 Максимально сильное влияние адаптация под цифровую подстанцию оказала на реализацию системы ДЗШ, что вылилось в необходимость применения разных схем ДЗШ для разных классов напряжения, жесткие ограничения по способу подключения AMU-модулей, а также схеме синхронизации времени. К терминалу ДЗШ предъявляются жесткие требования по быстродействию и отсутствию ложной работы. При этом он по определению получает измерения от нескольких источников и, соответственно, сталкивается с проблемами искажения входного сигнала. В силу этого, более подробно остановлюсь на особенности организации цифровой системы РЗА по ПС Надежда.
По 220 кВ на подстанции Надежда применена полуторная схема. Для ее защиты были применены два комплекта цифровой централизованной ДЗШ на базе терминала РЗА MiCOM P746. В ходе тестов в центре разработки было выявлено, что алгоритм работы данного терминала, базирующийся на быстром преобразовании Фурье, достаточно толерантен к задержкам в сети. В силу этого, данные два комплекта централизованной ДЗШ получают измерения из общей шины процесса (сегмент измерений). Единственное ограничение заключается в возможности подключить не более 6 плечей, что связано с пропускной способностью самой шины процесса, ограниченной 100 Мбит/с.
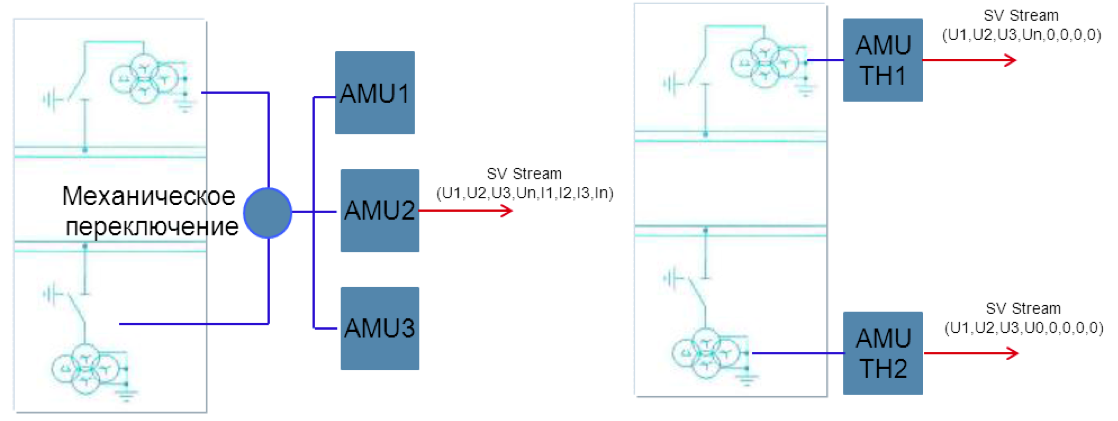
По 110 кВ на подстанции Надежда применена схема две секции шин, и количество защищаемых присоединений составляет 15 шт. (4 резерв), что потребовало применить распределенный принцип ДЗШ на базе терминала Р741 и набор периферийных модулей P743. Принцип работы распределенной схемы основан на сравнении мгновенных значений. В силу этого, данный алгоритм оказался крайне чувствителен к задержкам в поступлении пакетов данных. В частности, рассогласование в поступлении сигнала на 20 мкс может привести к его ложной работе ДЗШ. Исходя из этого, по распределенной схеме ДЗШ было принято решение максимально снизить возможные задержки в сети путем подключения периферийных модулей к AMU-модулям по топологии «точка-точка».
Отдельным сложным моментом при реализации цифровой распределенной ДЗШ стала организация схемы синхронизации времени. Я уже кратко упоминал об этом выше. Остановлюсь более подробно. Для традиционной распределенной схемы ДЗШ оцифровка значений тока производится на уровне периферийных модулей, которые в свою очередь синхронизируются с центрального модуля. В силу этого, ситуация с рассинхронизацией крайне маловероятна.
При реализации цифровой распределенной ДЗШ оцифровка измерений производится на уровне AMU-модулей, которые не могут быть синхронизированы с центрального модуля. В силу этого, каждый AMU-модуль должен быть привязан к единому времени. Причем чтобы избежать ложной работы для распределенной ДЗШ введено условие, что она может работать только в режиме «глобальной» синхронизации. Напомню, что кадры SV stream включают в себя биты признаков качества, одним из которых является бит типа синхронизации. Он может иметь следующие состояния: глобальная синхронизация от GPS, локальная синхронизация от локального источника времени, без синхронизации.
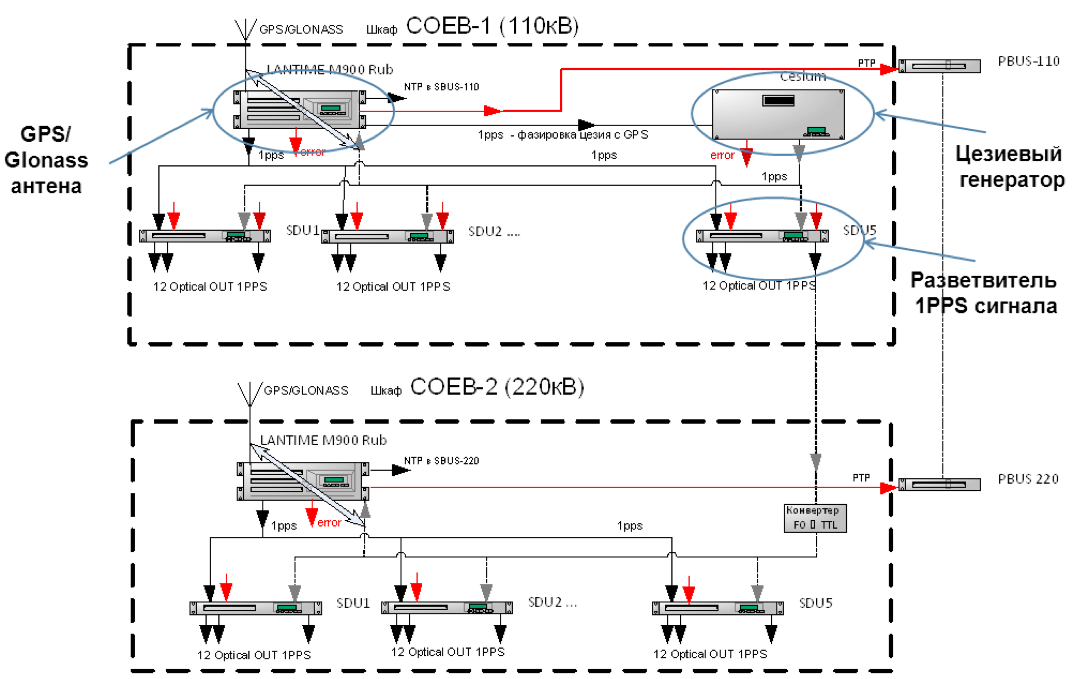
Такие жесткие требования по организации синхронизации времени, а также наличие неподалеку от подстанции аэропорта, обуславливающего проблемы с GPS/GLONASS-синхронизацией, привели к необходимости применения по проекту уникальной схемы синхронизации времени в составе:
Максимально сильное влияние адаптация под цифровую подстанцию оказала на реализацию системы ДЗШ, что вылилось в необходимость применения разных схем ДЗШ для разных классов напряжения, жесткие ограничения по способу подключения AMU-модулей, а также схеме синхронизации времени. К терминалу ДЗШ предъявляются жесткие требования по быстродействию и отсутствию ложной работы. При этом он по определению получает измерения от нескольких источников и, соответственно, сталкивается с проблемами искажения входного сигнала. В силу этого, более подробно остановлюсь на особенности организации цифровой системы РЗА по ПС Надежда.
По 220 кВ на подстанции Надежда применена полуторная схема. Для ее защиты были применены два комплекта цифровой централизованной ДЗШ на базе терминала РЗА MiCOM P746. В ходе тестов в центре разработки было выявлено, что алгоритм работы данного терминала, базирующийся на быстром преобразовании Фурье, достаточно толерантен к задержкам в сети. В силу этого, данные два комплекта централизованной ДЗШ получают измерения из общей шины процесса (сегмент измерений). Единственное ограничение заключается в возможности подключить не более 6 плечей, что связано с пропускной способностью самой шины процесса, ограниченной 100 Мбит/с.
По 110 кВ на подстанции Надежда применена схема две секции шин, и количество защищаемых присоединений составляет 15 шт. (4 резерв), что потребовало применить распределенный принцип ДЗШ на базе терминала Р741 и набор периферийных модулей P743. Принцип работы распределенной схемы основан на сравнении мгновенных значений. В силу этого, данный алгоритм оказался крайне чувствителен к задержкам в поступлении пакетов данных. В частности, рассогласование в поступлении сигнала на 20 мкс может привести к его ложной работе ДЗШ. Исходя из этого, по распределенной схеме ДЗШ было принято решение максимально снизить возможные задержки в сети путем подключения периферийных модулей к AMU-модулям по топологии «точка-точка».
Отдельным сложным моментом при реализации цифровой распределенной ДЗШ стала организация схемы синхронизации времени. Я уже кратко упоминал об этом выше. Остановлюсь более подробно. Для традиционной распределенной схемы ДЗШ оцифровка значений тока производится на уровне периферийных модулей, которые в свою очередь синхронизируются с центрального модуля. В силу этого, ситуация с рассинхронизацией крайне маловероятна.
При реализации цифровой распределенной ДЗШ оцифровка измерений производится на уровне AMU-модулей, которые не могут быть синхронизированы с центрального модуля. В силу этого, каждый AMU-модуль должен быть привязан к единому времени. Причем чтобы избежать ложной работы для распределенной ДЗШ введено условие, что она может работать только в режиме «глобальной» синхронизации. Напомню, что кадры SV stream включают в себя биты признаков качества, одним из которых является бит типа синхронизации. Он может иметь следующие состояния: глобальная синхронизация от GPS, локальная синхронизация от локального источника времени, без синхронизации.
Такие жесткие требования по организации синхронизации времени, а также наличие неподалеку от подстанции аэропорта, обуславливающего проблемы с GPS/GLONASS-синхронизацией, привели к необходимости применения по проекту уникальной схемы синхронизации времени в составе:
- Основным источником времени является цезиевый генератор;
- Вспомогательным – оборудование Lantime M900 Майнберг, которое может синхронизироваться по GPS/GLONASS-антенне;
- Разветвители оптического 1PPS сигнала, которые позволяют осуществить синхронизацию всех AMU модулей и терминалов РЗА по всей подстанции.
 Помимо этого для проверки времени работы традиционной и цифровой централизованной ДЗШ был собран стенд в составе:
Помимо этого для проверки времени работы традиционной и цифровой централизованной ДЗШ был собран стенд в составе:
- Два терминала MICOM P746 (CIT-NCIT);
- Omicron kit CMC 356;
- Коммутатор;
- AMU- и DMU-модули.
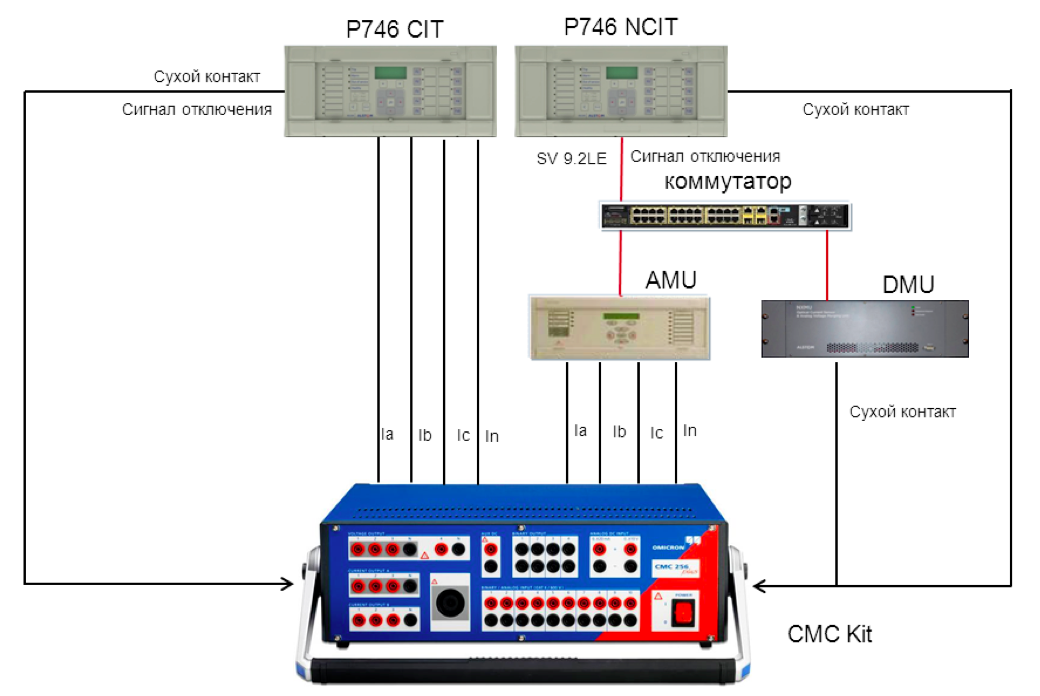 В ходе эксперимента с использованием СМС 356 имитировалась ситуация с возникновением дифференциального тока. При этом на один терминал P746 данные подавались в аналоговом виде, на другой – через AMU-модуль и коммутатор. В результате фиксировалось время выдачи телеуправления терминалов.
Было проведено порядка 30 тестов. Усредненные результаты приведены ниже. Время обработки сигнала на уровне AMU составило 1,5 мс. Общая задержка в работе цифрового P746 составила 2-4 мс.
Заключение
Реализация технологии цифровой подстанции, базирующейся на передаче мгновенных значений тока и напряжения в формате МЭК 61850-9.2LE, требует пересмотра подходов к реализации системы РЗА подстанции. При этом конечный заказчик получает как ряд бесспорных преимуществ: точность измерений, решение проблем с ЭМС, обеспечение безопасности эксплуатирующего персонала и т.д., так перед ним встает проблема обеспечения организации надежной работы системы РЗА. В силу того, что измерения передаются по шине процесса, которая по сути является коммуникационной сетью на базе протокола Ethernet, возможны задержки в доставке пакетов данных и даже их потери. Эта ситуация ставит перед производителями задачу обеспечения работоспособности алгоритмов работы терминалов РЗА при их использовании в составе цифровой подстанции. Наиболее ярко данные проблемы проявляются при реализации цифровой системы ДЗШ.
В ходе эксперимента с использованием СМС 356 имитировалась ситуация с возникновением дифференциального тока. При этом на один терминал P746 данные подавались в аналоговом виде, на другой – через AMU-модуль и коммутатор. В результате фиксировалось время выдачи телеуправления терминалов.
Было проведено порядка 30 тестов. Усредненные результаты приведены ниже. Время обработки сигнала на уровне AMU составило 1,5 мс. Общая задержка в работе цифрового P746 составила 2-4 мс.
Заключение
Реализация технологии цифровой подстанции, базирующейся на передаче мгновенных значений тока и напряжения в формате МЭК 61850-9.2LE, требует пересмотра подходов к реализации системы РЗА подстанции. При этом конечный заказчик получает как ряд бесспорных преимуществ: точность измерений, решение проблем с ЭМС, обеспечение безопасности эксплуатирующего персонала и т.д., так перед ним встает проблема обеспечения организации надежной работы системы РЗА. В силу того, что измерения передаются по шине процесса, которая по сути является коммуникационной сетью на базе протокола Ethernet, возможны задержки в доставке пакетов данных и даже их потери. Эта ситуация ставит перед производителями задачу обеспечения работоспособности алгоритмов работы терминалов РЗА при их использовании в составе цифровой подстанции. Наиболее ярко данные проблемы проявляются при реализации цифровой системы ДЗШ.